![]()
La chirurgie assistée par ordinateur (CAO) est une des évolutions importantes apportées à la chirurgie en général et à la chirurgie orthopédique en particulier depuis la fin des années 1990. Elle est de plus en plus utilisée en pratique courante par des équipes chirurgicales de plus en plus nombreuses. Il y a 3 systèmes de chirurgie assistée :
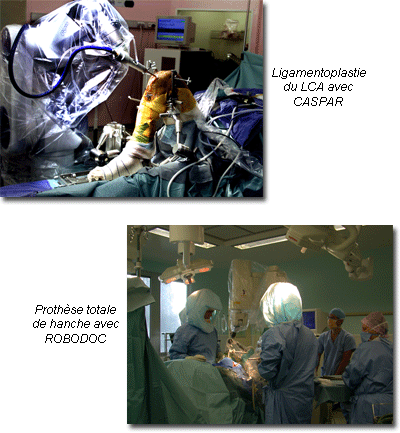
Les premiers robots de chirurgie orthopédique comme le système CASPAR® ou le système ROBODOC qui ont été utilisés pour la mise en place de tige de prothèses totales de hanche, de prothèses totales de genou, ainsi que pour la chirurgie de ligamentoplastie du ligament croisé antérieur ont actuellement disparu. Il s’agissait en fait de robots industriels, adaptés à la robotique chirurgicale, assez lourds à mettre en œuvre, très chers et qui nécessitaient également lors de chaque intervention un matériel consommable très onéreux. Ils ont donc été victimes de leurs inconvénients malgré une précision inégalée à ce jour en chirurgie.
Plusieurs sont actuellement en cours d’expérimentation. Ce sont des robots plus petits, moins chers, mieux adaptés à la chirurgie. Le seul robot commercialisé actuellement en France et utilisé par notre équipe est le guide de coupe I Block de chez Praxim.
Ce sont les SYSTÈMES DE NAVIGATION ainsi que les GUIDES DE COUPE SUR MESURE.
Ce sont les plus utilisés actuellement. Ils font appel :
![]() soit à une imagerie préopératoire comme le scanner,
soit à une imagerie préopératoire comme le scanner,
![]() soit à l’imagerie peropératoire (radiographie peropératoire) c’est la fluoroscopie virtuelle,
soit à l’imagerie peropératoire (radiographie peropératoire) c’est la fluoroscopie virtuelle,
![]() soit toutes les informations d’ordre cinématique et morphologique sont acquises pendant l’intervention, ce sont les systèmes sans imagerie.
soit toutes les informations d’ordre cinématique et morphologique sont acquises pendant l’intervention, ce sont les systèmes sans imagerie.
Dans la salle d’opération est disposée une caméra infrarouge binoculaire. Cette caméra est orientée vers les capteurs spécifiques munis de pastilles réfléchissantes qui sont fixées sur le squelette du patient et qui sont également situées sur les palpeurs et instruments qu’utilise le chirurgien.


Les centres instantanés de rotation articulaire sont donc enregistrés par l’ordinateur et on acquiert les données morphologiques et morphométriques en palpant les surfaces articulaires. La reconstruction de ces données est basée sur l’utilisation de modèles statistiques, c’est le BONE-MORPHING. La chirurgie de la hanche et surtout la chirurgie du genou se prêtent bien à l’utilisation de ces systèmes passifs sans imagerie. Ils sont utilisés pour le resurfaçage de hanche, pour optimiser la pose des prothèses de genou, pour améliorer le positionnement des greffes de LCA (ligament croisé antérieur) ainsi que pour les ostéotomies tibiales de valgisation.





